简单物体检测第四步——评估(Evaluation):Precision、Recall、F-Score、mAP
我们对检测效果作出评估。
对于检测效果,我们有Recall、Precision、F-Score、mAP等评价指标。
下面是相关术语中日英对照表:
中文 English 日本語 准确率 Accuracy 正確度 精度/查准率 Precision 適合率 查准率/查全率 Recall 再現率
查全率(Recall)——在多大程度上检测到了正确的矩形?用来表示涵盖了多少正确答案。取值范围为[0,1]:
\text{Recall}=\frac{G’}{G}
其中:
- $$G’$$——预测输出中阈值大于$$t$$,Ground-truth中阈值也大于$$t$$的矩形的数量;
- $$G$$——Ground-truth中阈值大于$$t$$的矩形的数量。
查准率(Precision)——表示结果在多大程度上是正确的。取值范围为[0,1]:
\text{Precision}=\frac{D’}{D}
其中:
- $$D‘$$——预测输出中阈值大于$$t$$,Ground-truth中阈值也大于$$t$$的矩形的数量;
- $$D$$——预测输出中阈值大于$$t$$的矩形的数量。
F-Score——是查全率(Recall)和查准率(Precision)的调和平均。可以表示两者的平均,取值范围为[0,1]:
\text{F-Score}=\frac{2\ \text{Recall}\ \text{Precision}}{\text{Recall}+\text{Precision}}
在文字检测任务中,通常使用Recall、Precision和F-Score等指标进行评估。
mAP——Mean Average Precision。在物体检测任务中,常常使用mAP进行效果评价。mAP的计算方法稍稍有点复杂:
- 判断检测出的矩形与Ground-truth的\text{IoU}是否大于阈值t,然后创建一个表。
| Detect | judge |
|---|---|
| detect1 | 1(当与Ground-truth的\text{IoU}\geq t时为1) |
| detect2 | 0 (当与Ground-truth的\text{IoU}< t时为0) |
| detect3 | 1 |
- 初始\text{mAP} = 0,上表按从上到下的顺序,judge为1的时候,按在此之上被检测出的矩形,计算\text{Precision},并加到\text{mAP}中去。
-
从表的顶部开始按顺序执行步骤2,完成所有操作后,将\text{mAP}除以相加的次数。
上面就是求mAP的方法了。对于上面的例子来说:
1. detect1 为1,计算\text{Precision}。\text{Precision} = \frac{1}{1} = 1,\text{mAP} = 1;
2. detect2 为0,无视;
3. detect3 为1,计算\text{Precision}。\text{Precision} = \frac{2}{3} = 0.67,\text{mAP} = 1+0.67=1.67。
4. 由于\text{mAP}进行了两次加法,因此\text{mAP} = 1.67 \div 2 = 0.835。
令阈值t=0.5,计算查全率、查准率、F-Score和mAP吧。
设下面的矩形为Ground-truth:
# [x1, y1, x2, y2]
GT = np.array(((27, 48, 95, 110), (101, 75, 171, 138)), dtype=np.float32)
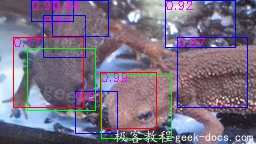
请将与Ground-truth的\text{IoU}为0.5以上的矩形用红线表示,其他的用蓝线表示。
解答
Recall >> 1.00 (2.0 / 2)
Precision >> 0.25 (2.0 / 8)
F-Score >> 0.4
mAP >> 0.0625
| 输入 (imori_many.jpg) | GT(answer_100_gt.jpg) | 输出(answer_100.jpg) |
|---|---|---|
 |
 |
 |
python实现:
import cv2
import numpy as np
np.random.seed(0)
# read image
img = cv2.imread("imori_1.jpg")
H, W, C = img.shape
# Grayscale
gray = 0.2126 * img[..., 2] + 0.7152 * img[..., 1] + 0.0722 * img[..., 0]
gt = np.array((47, 41, 129, 103), dtype=np.float32)
cv2.rectangle(img, (gt[0], gt[1]), (gt[2], gt[3]), (0,255,255), 1)
def iou(a, b):
area_a = (a[2] - a[0]) * (a[3] - a[1])
area_b = (b[2] - b[0]) * (b[3] - b[1])
iou_x1 = np.maximum(a[0], b[0])
iou_y1 = np.maximum(a[1], b[1])
iou_x2 = np.minimum(a[2], b[2])
iou_y2 = np.minimum(a[3], b[3])
iou_w = max(iou_x2 - iou_x1, 0)
iou_h = max(iou_y2 - iou_y1, 0)
area_iou = iou_w * iou_h
iou = area_iou / (area_a + area_b - area_iou)
return iou
def hog(gray):
h, w = gray.shape
# Magnitude and gradient
gray = np.pad(gray, (1, 1), 'edge')
gx = gray[1:h+1, 2:] - gray[1:h+1, :w]
gy = gray[2:, 1:w+1] - gray[:h, 1:w+1]
gx[gx == 0] = 0.000001
mag = np.sqrt(gx ** 2 + gy ** 2)
gra = np.arctan(gy / gx)
gra[gra<0] = np.pi / 2 + gra[gra < 0] + np.pi / 2
# Gradient histogram
gra_n = np.zeros_like(gra, dtype=np.int)
d = np.pi / 9
for i in range(9):
gra_n[np.where((gra >= d * i) & (gra <= d * (i+1)))] = i
N = 8
HH = h // N
HW = w // N
Hist = np.zeros((HH, HW, 9), dtype=np.float32)
for y in range(HH):
for x in range(HW):
for j in range(N):
for i in range(N):
Hist[y, x, gra_n[y*4+j, x*4+i]] += mag[y*4+j, x*4+i]
## Normalization
C = 3
eps = 1
for y in range(HH):
for x in range(HW):
#for i in range(9):
Hist[y, x] /= np.sqrt(np.sum(Hist[max(y-1,0):min(y+2, HH), max(x-1,0):min(x+2, HW)] ** 2) + eps)
return Hist
def resize(img, h, w):
_h, _w = img.shape
ah = 1. * h / _h
aw = 1. * w / _w
y = np.arange(h).repeat(w).reshape(w, -1)
x = np.tile(np.arange(w), (h, 1))
y = (y / ah)
x = (x / aw)
ix = np.floor(x).astype(np.int32)
iy = np.floor(y).astype(np.int32)
ix = np.minimum(ix, _w-2)
iy = np.minimum(iy, _h-2)
dx = x - ix
dy = y - iy
out = (1-dx) * (1-dy) * img[iy, ix] + dx * (1 - dy) * img[iy, ix+1] + (1 - dx) * dy * img[iy+1, ix] + dx * dy * img[iy+1, ix+1]
out[out>255] = 255
return out
class NN:
def __init__(self, ind=2, w=64, w2=64, outd=1, lr=0.1):
self.w1 = np.random.normal(0, 1, [ind, w])
self.b1 = np.random.normal(0, 1, [w])
self.w2 = np.random.normal(0, 1, [w, w2])
self.b2 = np.random.normal(0, 1, [w2])
self.wout = np.random.normal(0, 1, [w2, outd])
self.bout = np.random.normal(0, 1, [outd])
self.lr = lr
def forward(self, x):
self.z1 = x
self.z2 = sigmoid(np.dot(self.z1, self.w1) + self.b1)
self.z3 = sigmoid(np.dot(self.z2, self.w2) + self.b2)
self.out = sigmoid(np.dot(self.z3, self.wout) + self.bout)
return self.out
def train(self, x, t):
# backpropagation output layer
#En = t * np.log(self.out) + (1-t) * np.log(1-self.out)
En = (self.out - t) * self.out * (1 - self.out)
grad_wout = np.dot(self.z3.T, En)
grad_bout = np.dot(np.ones([En.shape[0]]), En)
self.wout -= self.lr * grad_wout
self.bout -= self.lr * grad_bout
# backpropagation inter layer
grad_u2 = np.dot(En, self.wout.T) * self.z3 * (1 - self.z3)
grad_w2 = np.dot(self.z2.T, grad_u2)
grad_b2 = np.dot(np.ones([grad_u2.shape[0]]), grad_u2)
self.w2 -= self.lr * grad_w2
self.b2 -= self.lr * grad_b2
grad_u1 = np.dot(grad_u2, self.w2.T) * self.z2 * (1 - self.z2)
grad_w1 = np.dot(self.z1.T, grad_u1)
grad_b1 = np.dot(np.ones([grad_u1.shape[0]]), grad_u1)
self.w1 -= self.lr * grad_w1
self.b1 -= self.lr * grad_b1
def sigmoid(x):
return 1. / (1. + np.exp(-x))
# crop and create database
Crop_num = 200
L = 60
H_size = 32
F_n = ((H_size // 8) ** 2) * 9
db = np.zeros((Crop_num, F_n+1))
for i in range(Crop_num):
x1 = np.random.randint(W-L)
y1 = np.random.randint(H-L)
x2 = x1 + L
y2 = y1 + L
crop = np.array((x1, y1, x2, y2))
_iou = iou(gt, crop)
if _iou >= 0.5:
cv2.rectangle(img, (x1, y1), (x2, y2), (0,0,255), 1)
label = 1
else:
cv2.rectangle(img, (x1, y1), (x2, y2), (255,0,0), 1)
label = 0
crop_area = gray[y1:y2, x1:x2]
crop_area = resize(crop_area, H_size, H_size)
_hog = hog(crop_area)
db[i, :F_n] = _hog.ravel()
db[i, -1] = label
## training neural network
nn = NN(ind=F_n, lr=0.01)
for i in range(10000):
nn.forward(db[:, :F_n])
nn.train(db[:, :F_n], db[:, -1][..., None])
# read detect target image
img2 = cv2.imread("imori_many.jpg")
H2, W2, C2 = img2.shape
# Grayscale
gray2 = 0.2126 * img2[..., 2] + 0.7152 * img2[..., 1] + 0.0722 * img2[..., 0]
# [h, w]
recs = np.array(((42, 42), (56, 56), (70, 70)), dtype=np.float32)
detects = np.ndarray((0, 5), dtype=np.float32)
# sliding window
for y in range(0, H2, 4):
for x in range(0, W2, 4):
for rec in recs:
dh = int(rec[0] // 2)
dw = int(rec[1] // 2)
x1 = max(x-dw, 0)
x2 = min(x+dw, W2)
y1 = max(y-dh, 0)
y2 = min(y+dh, H2)
region = gray2[max(y-dh,0):min(y+dh,H2), max(x-dw,0):min(x+dw,W2)]
region = resize(region, H_size, H_size)
region_hog = hog(region).ravel()
score = nn.forward(region_hog)
if score >= 0.7:
#cv2.rectangle(img2, (x1, y1), (x2, y2), (0,0,255), 1)
detects = np.vstack((detects, np.array((x1, y1, x2, y2, score))))
# Non-maximum suppression
def nms(_bboxes, iou_th=0.5, select_num=None, prob_th=None):
#
# Non Maximum Suppression
#
# Argument
# bboxes(Nx5) ... [bbox-num, 5(leftTopX,leftTopY,w,h, score)]
# iou_th([float]) ... threshold for iou between bboxes.
# select_num([int]) ... max number for choice bboxes. If None, this is unvalid.
# prob_th([float]) ... probability threshold to choice. If None, this is unvalid.
# Return
# inds ... choced indices for bboxes
#
bboxes = _bboxes.copy()
bboxes[:, 2] = bboxes[:, 2] - bboxes[:, 0]
bboxes[:, 3] = bboxes[:, 3] - bboxes[:, 1]
# Sort by bbox's score. High -> Low
sort_inds = np.argsort(bboxes[:, -1])[::-1]
processed_bbox_ind = []
return_inds = []
unselected_inds = sort_inds.copy()
while len(unselected_inds) > 0:
process_bboxes = bboxes[unselected_inds]
argmax_score_ind = np.argmax(process_bboxes[::, -1])
max_score_ind = unselected_inds[argmax_score_ind]
return_inds += [max_score_ind]
unselected_inds = np.delete(unselected_inds, argmax_score_ind)
base_bbox = bboxes[max_score_ind]
compare_bboxes = bboxes[unselected_inds]
base_x1 = base_bbox[0]
base_y1 = base_bbox[1]
base_x2 = base_bbox[2] + base_x1
base_y2 = base_bbox[3] + base_y1
base_w = np.maximum(base_bbox[2], 0)
base_h = np.maximum(base_bbox[3], 0)
base_area = base_w * base_h
# compute iou-area between base bbox and other bboxes
iou_x1 = np.maximum(base_x1, compare_bboxes[:, 0])
iou_y1 = np.maximum(base_y1, compare_bboxes[:, 1])
iou_x2 = np.minimum(base_x2, compare_bboxes[:, 2] + compare_bboxes[:, 0])
iou_y2 = np.minimum(base_y2, compare_bboxes[:, 3] + compare_bboxes[:, 1])
iou_w = np.maximum(iou_x2 - iou_x1, 0)
iou_h = np.maximum(iou_y2 - iou_y1, 0)
iou_area = iou_w * iou_h
compare_w = np.maximum(compare_bboxes[:, 2], 0)
compare_h = np.maximum(compare_bboxes[:, 3], 0)
compare_area = compare_w * compare_h
# bbox's index which iou ratio over threshold is excluded
all_area = compare_area + base_area - iou_area
iou_ratio = np.zeros((len(unselected_inds)))
iou_ratio[all_area < 0.9] = 0.
_ind = all_area >= 0.9
iou_ratio[_ind] = iou_area[_ind] / all_area[_ind]
unselected_inds = np.delete(unselected_inds, np.where(iou_ratio >= iou_th)[0])
if prob_th is not None:
preds = bboxes[return_inds][:, -1]
return_inds = np.array(return_inds)[np.where(preds >= prob_th)[0]].tolist()
# pick bbox's index by defined number with higher score
if select_num is not None:
return_inds = return_inds[:select_num]
return return_inds
detects = detects[nms(detects, iou_th=0.25)]
# Evaluation
# [x1, y1, x2, y2]
GT = np.array(((27, 48, 95, 110), (101, 75, 171, 138)), dtype=np.float32)
## Recall, Precision, F-score
iou_th = 0.5
Rs = np.zeros((len(GT)))
Ps = np.zeros((len(detects)))
for i, g in enumerate(GT):
iou_x1 = np.maximum(g[0], detects[:, 0])
iou_y1 = np.maximum(g[1], detects[:, 1])
iou_x2 = np.minimum(g[2], detects[:, 2])
iou_y2 = np.minimum(g[3], detects[:, 3])
iou_w = np.maximum(0, iou_x2 - iou_x1)
iou_h = np.maximum(0, iou_y2 - iou_y1)
iou_area = iou_w * iou_h
g_area = (g[2] - g[0]) * (g[3] - g[1])
d_area = (detects[:, 2] - detects[:, 0]) * (detects[:, 3] - detects[:, 1])
ious = iou_area / (g_area + d_area - iou_area)
Rs[i] = 1 if len(np.where(ious >= iou_th)[0]) > 0 else 0
Ps[ious >= iou_th] = 1
R = np.sum(Rs) / len(Rs)
P = np.sum(Ps) / len(Ps)
F = (2 * P * R) / (P + R)
print("Recall >> {:.2f} ({} / {})".format(R, np.sum(Rs), len(Rs)))
print("Precision >> {:.2f} ({} / {})".format(P, np.sum(Ps), len(Ps)))
print("F-score >> ", F)
## mAP
mAP = 0.
for i in range(len(detects)):
mAP += np.sum(Ps[:i]) / (i + 1) * Ps[i]
mAP /= np.sum(Ps)
print("mAP >>", mAP)
# Display
for i in range(len(detects)):
v = list(map(int, detects[i, :4]))
if Ps[i] > 0:
cv2.rectangle(img2, (v[0], v[1]), (v[2], v[3]), (0,0,255), 1)
else:
cv2.rectangle(img2, (v[0], v[1]), (v[2], v[3]), (255,0,0), 1)
cv2.putText(img2, "{:.2f}".format(detects[i, -1]), (v[0], v[1]+9),
cv2.FONT_HERSHEY_SIMPLEX, 0.4, (255,0,255), 1)
for g in GT:
cv2.rectangle(img2, (g[0], g[1]), (g[2], g[3]), (0,255,0), 1)
cv2.imwrite("out.jpg", img2)
cv2.imshow("result", img2)
cv2.waitKey(0)