Harris角点检测第一步:Sobel + Gausian
本节和下一节对thorino.jpg进行 Harris 角点检测吧!
Harris 角点检测算法如下:
- 对图像进行灰度化处理;
-
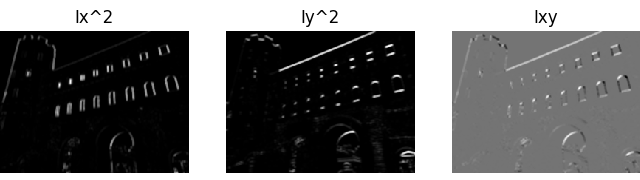
利用Sobel滤波器求出海森矩阵(Hessian matrix):
H=\left[\begin{matrix}{I_x}^2&I_xI_y\\I_xI_y&{I_y}^2\end{matrix}\right]
-
将高斯滤波器分别应用于{I_x}^2、{I_y}^2、I_x\ I_y;
-
计算每个像素的R = \det(H) – k\ (\text{trace}(H))^2。通常K在[0.04,0.16]范围内取值.
-
满足 R \geq \max(R) \cdot\text{th}的像素点即为角点。
本节至下一节中的参数如下:
- 高斯滤波器:k=3, \sigma=3;
- $$K = 0.04, \text{th} = 0.1$$。
在这里我们完成步骤1到步骤3。
| 输入 (thorino.jpg) | 输出 |
|---|---|
 |
 |
python实现:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# Harris corner detection
def Harris_corner_step1(img):
## Grayscale
def BGR2GRAY(img):
gray = 0.2126 * img[..., 2] + 0.7152 * img[..., 1] + 0.0722 * img[..., 0]
gray = gray.astype(np.uint8)
return gray
## Sobel
def Sobel_filtering(gray):
# get shape
H, W = gray.shape
# sobel kernel
sobely = np.array(((1, 2, 1),
(0, 0, 0),
(-1, -2, -1)), dtype=np.float32)
sobelx = np.array(((1, 0, -1),
(2, 0, -2),
(1, 0, -1)), dtype=np.float32)
# padding
tmp = np.pad(gray, (1, 1), 'edge')
# prepare
Ix = np.zeros_like(gray, dtype=np.float32)
Iy = np.zeros_like(gray, dtype=np.float32)
# get differential
for y in range(H):
for x in range(W):
Ix[y, x] = np.mean(tmp[y : y + 3, x : x + 3] * sobelx)
Iy[y, x] = np.mean(tmp[y : y + 3, x : x + 3] * sobely)
Ix2 = Ix ** 2
Iy2 = Iy ** 2
Ixy = Ix * Iy
return Ix2, Iy2, Ixy
# gaussian filtering
def gaussian_filtering(I, K_size=3, sigma=3):
# get shape
H, W = I.shape
## gaussian
I_t = np.pad(I, (K_size // 2, K_size // 2), 'edge')
# gaussian kernel
K = np.zeros((K_size, K_size), dtype=np.float)
for x in range(K_size):
for y in range(K_size):
_x = x - K_size // 2
_y = y - K_size // 2
K[y, x] = np.exp( -(_x ** 2 + _y ** 2) / (2 * (sigma ** 2)))
K /= (sigma * np.sqrt(2 * np.pi))
K /= K.sum()
# filtering
for y in range(H):
for x in range(W):
I[y,x] = np.sum(I_t[y : y + K_size, x : x + K_size] * K)
return I
# 1. grayscale
gray = BGR2GRAY(img)
# 2. get difference image
Ix2, Iy2, Ixy = Sobel_filtering(gray)
# 3. gaussian filtering
Ix2 = gaussian_filtering(Ix2, K_size=3, sigma=3)
Iy2 = gaussian_filtering(Iy2, K_size=3, sigma=3)
Ixy = gaussian_filtering(Ixy, K_size=3, sigma=3)
# show result
plt.subplots_adjust(left=0, right=1, top=1, bottom=0, hspace=0, wspace=0.2)
plt.subplot(1,3,1)
plt.imshow(Ix2, cmap='gray')
plt.title("Ix^2")
plt.axis("off")
plt.subplot(1,3,2)
plt.imshow(Iy2, cmap='gray')
plt.title("Iy^2")
plt.axis("off")
plt.subplot(1,3,3)
plt.imshow(Ixy, cmap='gray')
plt.title("Ixy")
plt.axis("off")
plt.savefig("out.png")
plt.show()
# Read image
img = cv2.imread("thorino.jpg").astype(np.float32)
# Harris corner detection step1
out = Harris_corner_step1(img)