在这里我们使用高斯金字塔制作简单的显著图。
显著图是将一副图像中容易吸引人的眼睛注意的部分(突出)表现的图像。
虽然现在通常使用深度学习的方法计算显著图,但是一开始人们用图像的RGB成分或者HSV成分创建高斯金字塔,并通过求差来得到显著图(例如Itti等人的方法)。
在这里我们使用在问题75中得到的高斯金字塔来简单地求出显著图。算法如下:
- 我们使用双线性插值调整图像大小至\frac{1}{128}、 \frac{1}{64}、\frac{1}{32}……一开始是缩放至\frac{1}{128}。
- 将得到的金字塔(我们将金字塔的各层分别编号为0,1,2,3,4,5)两两求差。
- 将第2步中求得的差分全部相加,并正规化至[0,255]。
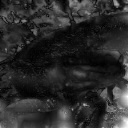
完成以上步骤就可以得到显著图了。虽然第2步中并没有指定要选择哪两张图像,但如果选择两个好的图像,则可以像答案那样得到一张显著图。
从图上可以清楚地看出,蝾螈的眼睛部分和颜色与周围不太一样的地方变成了白色,这些都是人的眼睛容易停留的地方。
解答中使用了(0,1)、(0,3)、(0,5)、(1,4)、(2,3)、(3,5)。
| 输入 (imori.jpg) | 输出 |
|---|---|
 |
 |
python实现:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# Grayscale
def BGR2GRAY(img):
# Grayscale
gray = 0.2126 * img[..., 2] + 0.7152 * img[..., 1] + 0.0722 * img[..., 0]
return gray
# Bi-Linear interpolation
def bl_interpolate(img, ax=1., ay=1.):
if len(img.shape) > 2:
H, W, C = img.shape
else:
H, W = img.shape
C = 1
aH = int(ay * H)
aW = int(ax * W)
# get position of resized image
y = np.arange(aH).repeat(aW).reshape(aW, -1)
x = np.tile(np.arange(aW), (aH, 1))
# get position of original position
y = (y / ay)
x = (x / ax)
ix = np.floor(x).astype(np.int)
iy = np.floor(y).astype(np.int)
ix = np.minimum(ix, W-2)
iy = np.minimum(iy, H-2)
# get distance
dx = x - ix
dy = y - iy
if C > 1:
dx = np.repeat(np.expand_dims(dx, axis=-1), C, axis=-1)
dy = np.repeat(np.expand_dims(dy, axis=-1), C, axis=-1)
# interpolation
out = (1-dx) * (1-dy) * img[iy, ix] + dx * (1 - dy) * img[iy, ix+1] + (1 - dx) * dy * img[iy+1, ix] + dx * dy * img[iy+1, ix+1]
out = np.clip(out, 0, 255)
out = out.astype(np.uint8)
return out
# make image pyramid
def make_pyramid(gray):
# first element
pyramid = [gray]
# each scale
for i in range(1, 6):
# define scale
a = 2. ** i
# down scale
p = bl_interpolate(gray, ax=1./a, ay=1. / a)
# up scale
p = bl_interpolate(p, ax=a, ay=a)
# add pyramid list
pyramid.append(p.astype(np.float32))
return pyramid
# make saliency map
def saliency_map(pyramid):
# get shape
H, W = pyramid[0].shape
# prepare out image
out = np.zeros((H, W), dtype=np.float32)
# add each difference
out += np.abs(pyramid[0] - pyramid[1])
out += np.abs(pyramid[0] - pyramid[3])
out += np.abs(pyramid[0] - pyramid[5])
out += np.abs(pyramid[1] - pyramid[4])
out += np.abs(pyramid[2] - pyramid[3])
out += np.abs(pyramid[3] - pyramid[5])
# normalization
out = out / out.max() * 255
return out
# Read image
img = cv2.imread("imori.jpg").astype(np.float)
# grayscale
gray = BGR2GRAY(img)
# pyramid
pyramid = make_pyramid(gray)
# pyramid -> saliency
out = saliency_map(pyramid)
out = out.astype(np.uint8)
# Save result
cv2.imshow("result", out)
cv2.waitKey(0)
cv2.imwrite("out.jpg", out)